When I drew the head pose on the xy plane, I had no idea how to draw it. This article is just a summary.
Head pose visualization
Head pose is a representation of the human head orientation.
To visualise head pose, this article draws the xyz unit vector on an image of a human head.
X-axis is drawn in red
Y-axis is drawn in green
Z-axis (out of the screen) is drawn in blue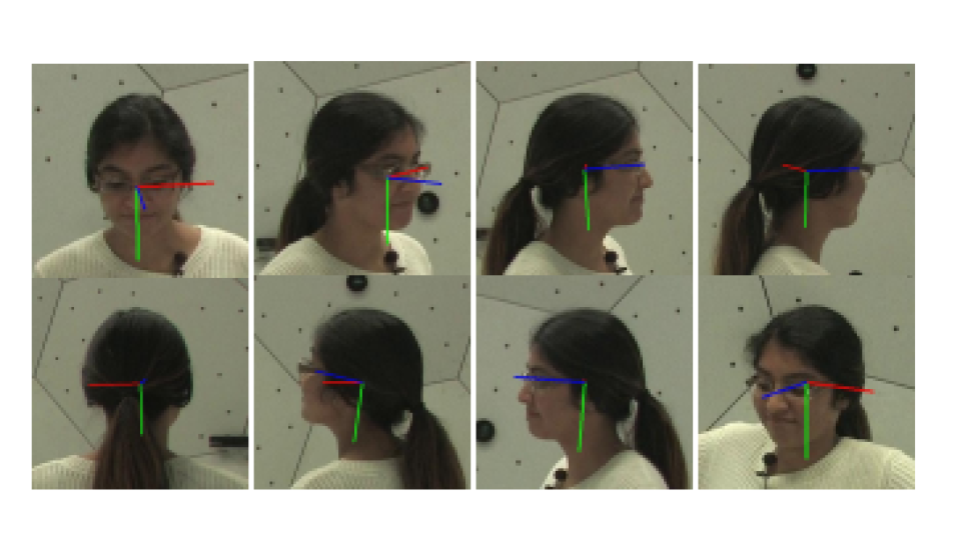
The Euler angles for head pose
The definition of the Euler angles for head pose is shown in the following left figure.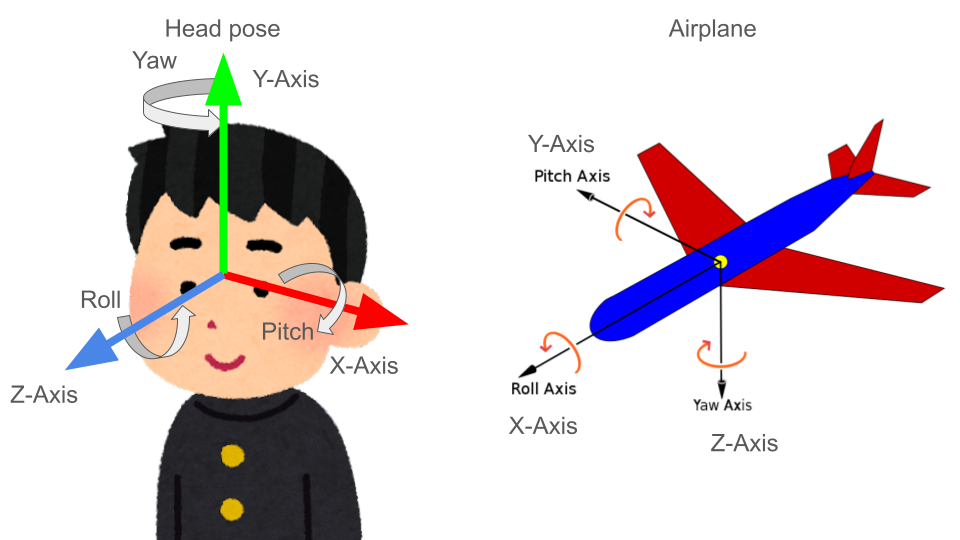
The representation of roll, pitch and yaw in xyz space depends on a perspective (field).
For example, a roll from the airplane's perspective rotates around the X-axis, but a roll from the head pose's perspective rotates around the Z-axis.
1. Convert the Euler angles to the rotation matrix
From this chapter, I explain how to draw the Euler angles in the xy plane.
First of all, convert the Euler angles to rotation matirx.
The following three basic rotation matrices rotate vectors by the Euler angles using the right-hand rule.
The rotation matrix of the X-axis is represented by $\boldsymbol{R_x}$, the rotation matrix of the Y-axis by $\boldsymbol{R_y}$ and the rotation matrix of the Z-axis by $\boldsymbol{R_z}$.
Note:
Please replace $\theta_{x}$, $\theta_{y}$ and $\theta_{z}$ to the Euler angles.
e.g. $\theta_{x}$ means $\theta_{pitch}$ for head pose.
This article rotates in the order Z, Y, X (roll, yaw, pitch).
Note that the order of rotation affects the final result.
The following equations use roll, pitch and yaw notation.
2. Project the xyz unit vector onto the xy plane
Next, to visualize the Euler angles, I draw the xyz unit vector in the xy plane (an image) as explained above.
The xyz unit vectors are represented as follows.
To project the xyz unit vector onto the xy plane, multiply the rotation matrix as follows
The Euler angles can be represented on the image by drawing the XY elements of the above equation (7) ~ (8) in the xy plane.
Sample code (AFLW2000)
Example of command line:
python3 view.py --dataset_root <path/to/the/AFLW2000/root/directory> --filename image00078
Example of execution: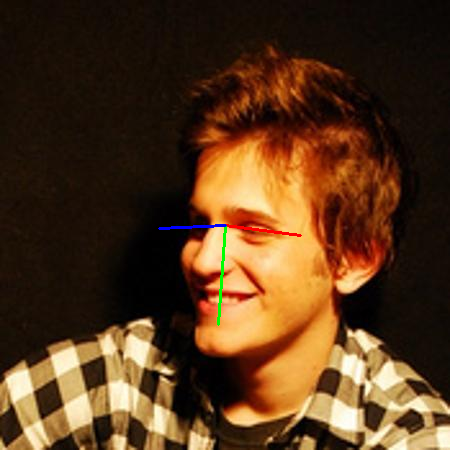
Sample code (view.py):
1import os
2import argparse
3import cv2
4import numpy as np
5import scipy.io as sio
6from math import cos, sin
7
8def parse_args():
9 parser = argparse.ArgumentParser()
10 parser.add_argument('--datasets_root',
11 help='Path to the root directory of AFLW2000 datasets',
12 type=str)
13 parser.add_argument('--filename',
14 help='Filename without extension to load the data',
15 type=str)
16 args = parser.parse_args()
17 return args
18
19
20def get_R(x,y,z):
21 ''' Get rotation matrix from three rotation angles (radians). right-handed.
22 Args:
23 angles: [3,]. x, y, z angles
24 Returns:
25 R: [3, 3]. rotation matrix.
26 '''
27 # x
28 Rx = np.array([[1, 0, 0],
29 [0, np.cos(x), -np.sin(x)],
30 [0, np.sin(x), np.cos(x)]])
31 # y
32 Ry = np.array([[np.cos(y), 0, np.sin(y)],
33 [0, 1, 0],
34 [-np.sin(y), 0, np.cos(y)]])
35 # z
36 Rz = np.array([[np.cos(z), -np.sin(z), 0],
37 [np.sin(z), np.cos(z), 0],
38 [0, 0, 1]])
39
40 R = Rx.dot(Ry.dot(Rz))
41 return R
42
43
44if __name__ == "__main__":
45 args = parse_args()
46
47 image_file = os.path.join(args.datasets_root, '{}.jpg'.format(args.filename))
48 mat_file = os.path.join(args.datasets_root, '{}.mat'.format(args.filename))
49
50 # Load .jpg
51 img = cv2.imread(image_file)
52 # Load .mat
53 mat = sio.loadmat(mat_file)
54
55 # [pitch yaw roll tdx tdy tdz scale_factor]
56 pre_pose_params = mat['Pose_Para'][0]
57 # Get [pitch, yaw, roll]
58 pitch, yaw, roll = pre_pose_params[:3]
59
60 # Covert to R
61 x = pitch
62 y = -yaw
63 z = roll
64 R = get_R(x, y, z)
65 print("Rotation matrix:\n", R)
66
67 # Draw Axis
68 cx = img.shape[1]//2
69 cy = img.shape[0]//2
70 size = 100
71 # X-axis pointing to right. drawn in red
72 x1 = size * R[0, 0] + cx
73 y1 = size * R[1, 0] + cy
74 # Y-axis drawn in green
75 x2 = size * R[0, 1] + cx
76 y2 = size * R[1, 1] + cy
77 # Z-axis (out of the screen) drawn in blue
78 x3 = size * R[0, 2] + cx
79 y3 = size * R[1, 2] + cy
80
81 cv2.line(img, (int(cx), int(cy)), (int(x1),int(y1)), (0,0,255), 2)
82 cv2.line(img, (int(cx), int(cy)), (int(x2),int(y2)), (0,255,0), 2)
83 cv2.line(img, (int(cx), int(cy)), (int(x3),int(y3)), (255,0,0), 2)
84
85 cv2.imshow("View", img)
86 cv2.waitKey(0)
87 cv2.destroyAllWindows()
88 print("End")Summary
The representation of roll, pitch and yaw in xyz space depends on a perspective.
Therefore I need to be concerned about which field I am dealing with, e.g.head pose, airplane.